

ブリヂストンは1月26日、東京工業大学の鈴森康一教授と同社櫻井良フェローらの研究チームが、極限の災害現場で活躍可能なタフなロボット実現のカギの一つである、油圧駆動のハイパワー人工筋肉の開発に成功したと発表した。
同プロジェクトは、内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環。
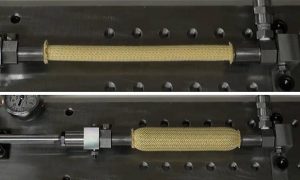
今回開発した人工筋肉は、材料にゴムチューブを用いることで軽量かつ衝撃や振動に強く、大きな力を出すことができる。この人工筋肉を用いることにより、コンパクトで省エネ型のタフなロボットの実現が可能になる。将来的には、今までにない小型軽量で高出力の産業用・家庭用ロボットへの展開も期待される。
この技術のポイントは「軽くて強い力」「丈夫で壊れにくい」「優しくて力持ち」なこと。超軽量でありながら、従来の電気モーターや油圧シリンダーに比べ約5~10倍の大きな力が出る。また、高耐久性・高耐油性ゴムによる高い耐衝撃性と耐振動性を実現。大小の力により、多彩な作業や制御が可能だ。
ImPACTタフ・ロボティクス・チャレンジでは、東日本大震災や阪神淡路大震災などの災害時の極限環境でも、人命救助や安全確保に効果を発揮できるタフでへこたれない「タフロボット」の実現を目指している。
タフロボット実現のキーコンポーネントの一つが「タフ油圧アクチュエーター」である。アクチュエーターとは、モーターやシリンダーに代表される「動きや力」を発生する装置の総称で、現在の大多数のロボットは、民生用を中心に広く使用されている技術の延長として、電気モーターで駆動している。
しかし、構造上「重くて力が弱い」「壊れやすい」「状況に応じて大きな力を出すと同時に柔らかく動くことが難しい」という問題があった。
今回開発した人工筋肉は、ゴムチューブと高張力繊維から構成され、油圧で作動する。ゴムチューブと高張力繊維によりなめらかな動きを実現するとともに、油圧での動作により、問題を解決することが可能になった。
今後はこの人工筋肉を用いたタフロボットの開発・実用化を進め、安全・安心な社会と高度なロボットサービスの実現、普及に貢献していく。また、さらなる高性能化を目指し、産業用・家庭用ロボットのアクチュエーターとしても、幅広い普及・展開を図る。

関連キーワード: ブリヂストン







